|
3 逆变电源系统软件设计
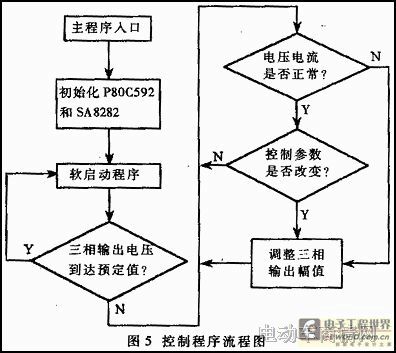
辅助三相逆变电源的控制软件通过8051汇编语言编制,在完成其控制功能外,力求程序的合理与简化,以适应电动汽车对系统稳定性和可靠性的要求,控制流程如图5所示。
系统上电运行后,单片机P80C952首先对SA8282芯片初始化寄存器进行数据初始化,然后根据负载电机的特点执行软启动程序。当三相输出电压达到预定值时,三相逆变电源即进入稳定运行状态。此后控制程序将循环检测各线路的电压、电流情况,根据情况修改SA8282控制寄存器参数,调整PWM输出,从而改变三相输出。例如,电动车运行一段时间后,电池组电压下降,导致逆变电源的三相输出电压低于设定值,P80C592检测到该现象后,通过SA8282提高电压输出幅值,确保电源输出的稳定。
同时,控制程序还将定期检测数据存储器中的控制参数。若整车控制系统通过CAN通讯修改了逆变电源的运行参数,P80C592将根据新的运行参数调整输出。
控制程序中的三个中断程序分别为:数据采集程序、CAN总线通讯程序和故障处理程序。
数据采集程序通过芯片内部计数器定时触发,对逆变电源的输入、输出线路进行数据采集,经模/数转换后存入数据存储器,交给CPU进行运行状况判断。
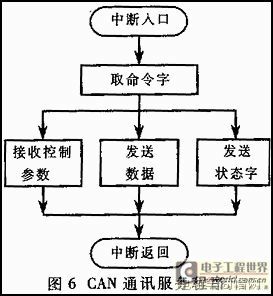
CAN总线通讯程序包含若干子程序,其基本程序结构如图6所示。当通讯程序触发后,P80C592的CAN控制器提据命令字执行相关任务。当上位机请求数据时,将逆变电源的各项运行参数传输给整车系统;当上位机查询节点状态时,将当前CAN节点状态等数据发磅出去;当上位机要求修改运行参数时,将接收的数据参数存入数据存储器。
故障处理程序具有最高的中断优先权,即将P80C592的外部中断0(INT0)管脚与SA8282芯片的TRIP管脚相连。当逆变电路发生故障时,IPM会发出故障信号给SA8282芯片,由后者在第一时间关断PWM输出,并向P80C592发出中断信号,触发故障处理程序。故障处理程序首先将SA8282关闭;然后通过CAN总线通知上位机有故障发生,并将故障代码和当前系统运行参数写入报文同时发送;最后控制单片机将整个系统关闭,实现安全关机。
CAN通信网络的引入为电动车的全局优化控制提供了条件,车辆的每个子系统都因此成为整车控制中的智能节点。采用集成CAN控制器的P8xC592单片机作为控制核心,结合SA8282专用PWM波形发生芯片设计出的电动车用辅助三相逆变电源,不仅安全稳定性高,还能够充分参与整车的数据交换和控制。对于采用不同CAN总线协议的电动车辆,只需适当修改控制程序中有关CAN通讯的部分程序段,就可以顺利接入整车系统,使该逆变电源具有更强的通用性。
|




















