如果上桥臂的功率MOSFET管关断时,下桥臂的功率MOSFET管不导通,完全依靠其体内寄生的二极管导通续流,这种控制方法为非同步整流控制;如果上桥臂的功率MOSFET管关断时,下桥臂的功率MOSFET管经过一定的延时即后导通,这种控制方法为同步整流控制。同步整流控制时,下桥臂由功率MOSFET管导通续流,因此提高了系统的效率。
对于非同步整流控制,常用的控制IC为MC33035。对于同步整流控制,常用的控制MCU为PIC16F72,Cypress CY8C以及凌阳的单片机。同步整流控制具有高的效率,应用更为广泛。
1.2 功率MOSFET管的驱动电路
目前无刷直流电机控制器的功率MOSFET管的驱动电路有两种方案:集成的驱动IC和由分离的元件即PNP三极管、NPN三极管、电阻电容和逻辑电路组成的驱动电路。使用集成的驱动IC时,驱动电路设计相对的简单,系统可靠性高,结构紧凑,但成本高。使用分离的元件的驱动电路,系统设计和调试复杂要复杂一些,由于分离的元件参数的分散性,驱动电路很难做到优化的设计。
当系统使用不同的功率MOSFET管时,驱动电路的相关参数必须进行适当的调整,在功率MOSFET管开通时,以得到合适的门极电压随时间上升的斜率,即dVgs/dt,从而在功率MOSFET管的开通功耗和VDS电压尖峰之间取得一定的平衡。
1.3 电流检测

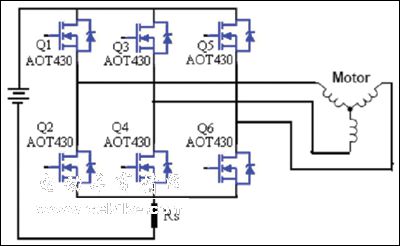
在图1中,Rs为电流检测电阻,Rs上的电流检测电压VRS送到图2所示的电流检测电路;电流检测电路为运放LM358组成的同相放大器。同相放大器有较高的共模抑制比CMRR,可以抑制来自接地的电流检测电阻的共模噪声。电阻R4和电容C1组成RC滤波电路,抑制电流检测信号的共差噪声。
在图1中,功率MOSFET管为AOS的AOT430,从其数据表可以看出,其门极和源极的电容以及门极和漏极的电容与其它公司不同,因此针对其应用,驱动电路的设计要考虑到这些参数的影响。通常在电动自行车的应用中,通过调整门极串联电阻和门极和源极的并联电容的值来调整MOSFET的开通速度。门极串联电阻和门极和源极的并联电容值越大,开关的速度越慢。只有选取合适的驱动电路的参数以及一个桥臂上下管导通的间隔,在同步整流控制方式上,就可以很好的控制开关管在关断时DS上的电压尖峰,同时保证MOSFET的开关损耗在其所承受的额定值之内。加大门极串联电阻以及加大门极和源极的并联电容的值可以降低MOSFET开通的速度,但也增加了其在电阻区的时间,从而增加了开通损耗。
2.2 电流检测
通常控制器发生故障是主功率MOSFET管的损坏,有时是一个桥臂的单个功率管烧坏,有时是整个桥臂的两个功率MOSFET管同时烧坏。在起动以及堵转的条件下,功率MOSFET管烧坏的几率较大。在同步整流控制方式中,在起动过程中,由于CPU进行初始化需要一定的时间,CPU输出的驱动信号的稳定也需要一定的时间,那么在起动中就可能产生驱动的信号逻辑关系不稳定或混乱的现象,从而导致一个桥臂上下管直通,而此时由于电流检测电路的信号送到CPU时,CPU还来不及处理,从而损坏功率MOSFET。最好采用一定的上电时序电路,使CPU先上电,稳定后才加功率电源。
堵转是电动自行车最恶劣的工作状态,此时也会发生一个桥臂上下管的直通。在实际应用的过程中,尽管采用了由LM385组成的电流检测电路,但是MOSFET仍然产生烧坏的现象,这表明电流检测电路没有可靠的工作。电流检测电阻采用一定长度的康铜丝,考虑限流值的范围,设计时电流检测电阻必须以最大的限流值作为参考。另外电阻的精度也会影响电流检测的精确度。电流取样信号必须直接引自取样电阻的两端,以免影响电流检测的精度。另外检测电阻两个管脚的焊锡也会影响取样电阻的电阻值,从而也会影响取样电流的精度。
电流的取样精度是系统进行可靠的电流保护的前提。在排除以上问题的前提下,还有一个十分重要的参数影响电流的取样精度。在图1中,使用了一个RC的滤波器滤除干扰噪声,但这个RC的滤波器会对电流的取样信号带来延时,RC的值越大,延时也就越大,信号幅值的误差也越大。LM358对输入信号有一定的带宽限制,放大倍数越大,信号的带宽越窄。另外,CPU在接收到过流信号时,从响应中断到处理完中断,到最后关断输出脉冲也需要一定的时间,那么这样参数的细节不经过仔细的考虑,在上下桥臂直通后短路,电流随时间迅速增大,电流检测电阻的电压信号也随时间迅速增加,当CPU检测到过流信号后输出保护关断脉冲前,各种延时使上下桥臂直通产生的电流远远大于实际设定的过流保护点,从而烧坏MOSFET管。尤其是在温度升高时,LM358的带宽进一步的降低,影响过流保护的响应时间。
由此可证:减小RC值,提高CPU的工作频率,使用高GBP的运算放大器或使用工业级的运放LM258,可以提高过流响应的时间和精确度。
2.3 PCB设计
PCB的布局通常是每个桥臂的上下MOSFET并排在一起放置,三个桥臂六个MOSFEF排成一列,电流的取样电阻放置在最边沿的一个桥臂下,那么就有一个桥臂离电流检测电阻最远。从实际的应用发现:最容易损坏的桥臂就是这个离电流检测电阻最远的桥臂。由于其回路的走线长,寄生电感值大,在较高的电流变化的条件下,会产生很大的电压尖峰,从而烧坏MOSFET管。因此在PCB的设计时,可以将电流检测电阻放大中间的桥臂下方,从而使三个桥臂的电感减小做到优化和平衡。另外,也可以对最远的桥臂的DS间加RC形成的箝位吸收电路,抑制电压尖峰。
在PCB设计时要做到功率地和信号地的分离,所有的芯片加去耦电容,提高系统的抗干扰性。
2.4 整机的防护
从用户返修的调查发现,在潮湿的阴雨天,控制器更容易损坏。在整机中,绝大多数的控制器安放在电动自行车的底部,只有极少数整机厂将控制器安放在电动自行车的上部座板下面;而且绝大多数的控制器安放盒没有防水措施。无防水措施且安放在电动自行车的底部的控制器,在潮湿的阴雨天使用或停放在户外,湿气或雨水极其容易进入到控制器的PCB上,导致电路板局部的短路,加电后,烧坏控制器的功率MOSFET。因此,在整机的设计上,应该加强对控制器的防水处理,以提高控制器的可靠性。
3、电动自行车控制器发展趋势
3.1 控制器的电源电池
目前,绝大多数的电动自行车使用三节或四节的铅酸电池,电源的总线电压为36V或48V。相对而言,尽管铅酸电池的能量密度低,体积大,不环保,但是由于其价格便宜,易于充电和维修,因此,仍然得到大多数电动自行车整车厂的采用。常规的锂离子电池尽管能量密度高,体积小,但是由于其安全性和充电管理复杂,总体成本高等问题,应用比例很小。从未来的发展来看,Ni-MH镍氢电池和改进的锂铁电池将在性价比上具有极强的竞争优势。
Ni-MH镍氢电池比常规的锂离子电池安全,比铅酸电池和镍镉电池具有更高的能量密度和功率密度,可以快速的充放电,充放电的次数多,而且具有无记忆效应、无污染、不需要维护等特点,在一些高端的市场,已经获得应用,而且在未来几年,换用镍氢电池的比率和趋势将越来越明显。
此外,近几年出现的新型的锂铁电池与常规的锂离子电池相比,其单节的电压3.7-3.8V,尽管能量密度和功率密度要稍低一些,但安全性得到了极大的提高。锂铁电池的充电管理复杂程度和镍氢电池差不多,但其能量密度和功率密度比镍氢电池高,不会自放电,将会更为高端的市场上获得一定的应用。
3.2 功率MOSFET管和驱动
未来的电动自行车控制器将更着眼于进一步提高系统的可靠性和紧凑性。为了提高系统的可靠性,必须提高功率MOSFET管和驱动电路的可靠性。三个桥臂六个功率MOSFET管和六组由分离元件构成的驱动电路的结构必须进行优化,即使用集成的模块,在芯片级的质量控制水平的基础上,提高系统的可靠性。同时,使用集成的模块,也进一步的提高了系统的紧凑性。
集成的模块有三种方式:
(1)集成上下桥臂两个功率MOSFET管,下桥臂的功率MOSFET管具有更低的导通电阻。这样,一个控制器使用三个模块,上下桥臂功率MOSFET管连线电感小,PCB的布局更加紧凑,布线更加简短,从而简化了系统的设计。
(2)集成上下桥臂两个功率MOSFET管及相应的驱动电路。由于模块内MOSFET的参数一致,因此可以针对MOSFET的具体参数,使用优化的驱动电路,这样,进一步的简化了系统的设计。其内部将带有过温OT和过流OC的保护,进一步的提高系统的可靠性。
(3)集成三个桥臂的六个功率MOSFET管及相应的驱动电路,这是全集成的最简洁的模块方案,模块内部必须带有可靠的过温OT、过流OC、过压OV等各种保护功能,才不会发生一个功率MOSFET管或一组桥臂损坏整个模块报废的问题。这样才能在成本、可靠性及设计复杂程度之间成为一个折衷的方案。
3.3 控制器功能的拓展
未来的电动自行车控制器将在功能上进一步的拓展,如带有仪表控制和车灯控制的功能,从而进一步降低系统的成本,提高的紧凑性。
作者介绍:刘松,男,硕士,1972生,籍贯:湖北省武汉市,万代半导体元件有限公司应用中心经理,曾任凌特有限公司上海办事处应用工程师,ST意法半导体上海有限公司高级电源系统工程师,现主要从事开关电源系统及模拟电路的应用研究和开发工作。发表论文30余篇,获发明专利一项及广东省科技进步二等奖一项。
欢迎与作者交流。Email:adlsong@sina.com songliu@aosmd.com